
The “Bouba–Kiki” experiment is a well-known way psychologists study how our senses connect with each other. It looks at how we naturally match sounds with visual shapes.
In this kind of study, people are shown two simple shapes:
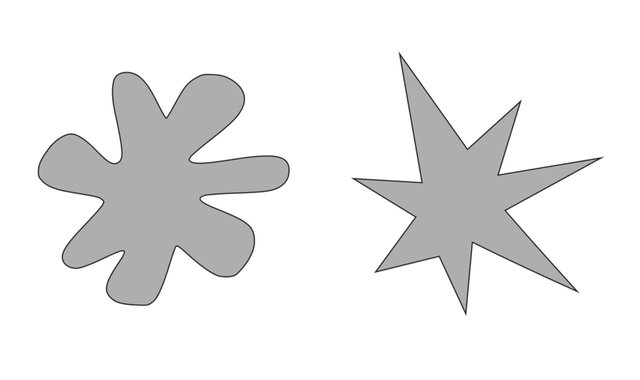
(Don’t google before making a guess!). I have greater than 95% chance of guessing your answer correct. If I’m wrong, unfortunately or fortunately, you are one of the less than 5% outliers in the whole population!
Across different cultures and languages, most people tend to match:
This simple experiment shows how our senses are not completely separate—they influence each other. Understanding these connections can help designers create richer, more engaging multisensory experiences, where visuals, sounds, and even textures feel naturally connected.
The above example shows crossmodal correlation exists between 2D-shape recognition and phonemes.
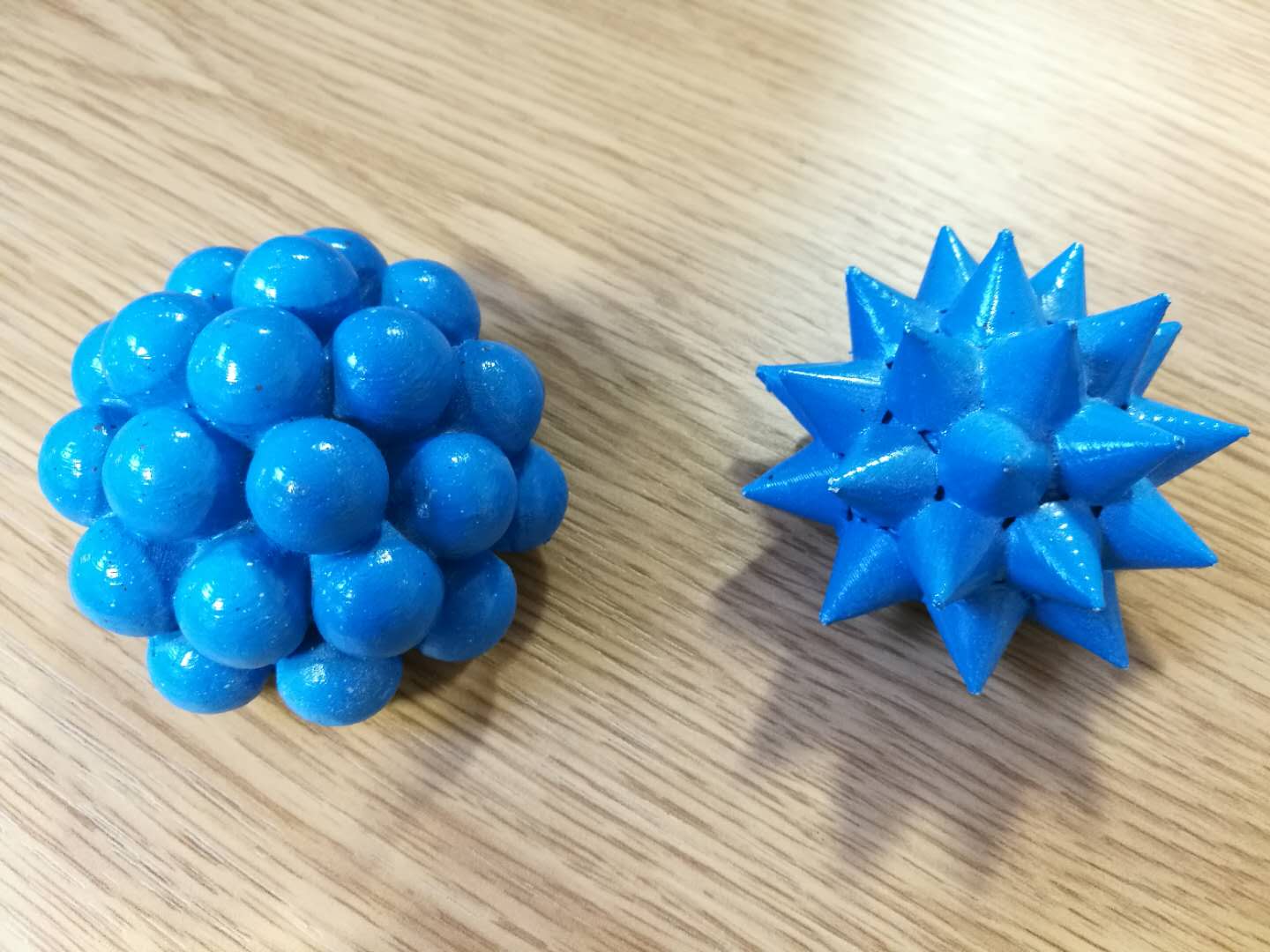
This perceptual correlation has also been found between 3D-shapes and the phonemes of “Bouba” and “Kiki” alike, as shown in the figure below.
How can we leverage such a perceptual regularity to benefit our life?
An interesting application is to build a perceptual common ground, for instance, the tangible pain assessment tool. This project uses tangible “Bouba-kiki” shapes to present “a range of expressive possibilities, allowing young children to communicate qualitative information that they typically are unable to communicate due to limitations in their linguistic capacity.”

(This figure is adopted from the core77.)
In our research we aim to empirically investigate emotional states that people can perceive based on the transition between tangible “Bouba” and “Kiki”.
Our research seeks to discover how people understand the affordances that shape-change device, interfaces and robots provide, both physically and psychologically.
We built a pneumatically actuated robot, the BK robot, and control the size, speed, and frequency of the change between the “Bouba” and “Kiki”.
This little bot feels your heart and synchronises its beat with you.
Understanding the effect of shape-transformation on emotional states, so that:
a. Develop a wearable shape-change skin for robot and human
b. Explore how this shape-change mechanism can be applied to Human-human and Human-robot interaction (HHI and HRI)